
1. Concept Overview
The moment of inertia (M.I.) of a body depends on the distribution of its mass about the axis of rotation.
For a thin uniform rod, the M.I. varies depending on whether the axis passes through the center or one end of the rod.
A “thin” rod means its thickness is negligible compared to its length, so mass distribution is considered along one dimension.
2. Derivation
Let:
- Length of the rod = [ L ]
- Mass of the rod = [ M ]
- Linear mass density = [ \lambda = \dfrac{M}{L} ]
Consider an infinitesimal element of length [ dx ] at a distance [ x ] from one end.
The mass of this element is [ dm = \lambda , dx ].
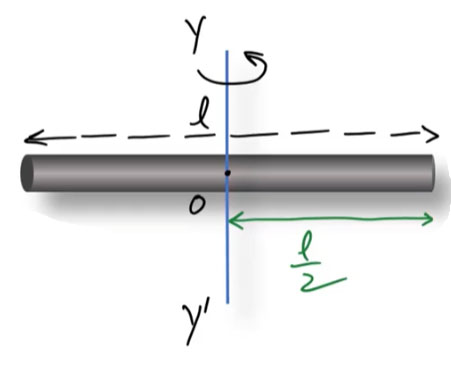
(A) Moment of Inertia about an Axis through the Center and Perpendicular to the Length
For this case, the origin is at the center of the rod.
So, the limits are from [ -\dfrac{L}{2} ] to [ +\dfrac{L}{2} ].
[
I_{center} = \int_{-\dfrac{L}{2}}^{+\dfrac{L}{2}} x^2 dm = \lambda \int_{-\dfrac{L}{2}}^{+\dfrac{L}{2}} x^2 , dx
]
$ \displaystyle {{I}_{{center}}}=\lambda \left[ {\frac{{{{x}^{3}}}}{3}} \right]_{{-\frac{L}{2}}}^{{+\frac{L}{2}}}=\lambda \frac{{{{L}^{3}}}}{{12}}$
Substituting [ \lambda = \dfrac{M}{L} ]:
[
\boxed{I_{center} = \dfrac{1}{12} M L^2}
]
(B) Moment of Inertia about an Axis through One End and Perpendicular to the Length
Now, take the axis through one end of the rod.
The limits are from [ 0 ] to [ L ].
[
I_{end} = \int_{0}^{L} x^2 , dm = \lambda \int_{0}^{L} x^2 , dx
]
$ \displaystyle I_{end} = \lambda \left[ \dfrac{x^3}{3} \right]_0^L = \lambda \dfrac{L^3}{3}$
Substituting [ \lambda = \dfrac{M}{L} ]:
[
\boxed{I_{end} = \dfrac{1}{3} M L^2}
]
3. Relation between the Two Axes
Using the Parallel Axis Theorem:
[I_{end} = I_{center} + M \left(\dfrac{L}{2}\right)^2] [= \dfrac{1}{12} M L^2 + \dfrac{1}{4} M L^2 = \dfrac{1}{3} M L^2]
This verifies the derived results are consistent.
4. Physical Significance
- The M.I. about one end is four times that about the center.
- The farther the axis from the center, the greater the resistance to rotational motion.
- These results are fundamental for analyzing rotating systems like pendulums, rods, and beams.
5. Key Features
- Rod is uniform and thin, so only one dimension contributes to M.I.
- The M.I. depends on both mass and square of length.
- The results follow directly from the definition of M.I. and Parallel Axis Theorem.
6. Important Formulas to Remember
| Axis of Rotation | Moment of Inertia | Formula | Remarks |
|---|---|---|---|
| Through center (⊥ to length) | [ I_{center} ] | [ \dfrac{1}{12} M L^2 ] | Symmetrical about center |
| Through one end (⊥ to length) | [ I_{end} ] | [ \dfrac{1}{3} M L^2 ] | Axis at end of rod |
| Relation between both | [ I_{end} = I_{center} + M\left(\dfrac{L}{2}\right)^2 ] | [ \dfrac{1}{3} M L^2] [= \dfrac{1}{12} M L^2 + \dfrac{1}{4} M L^2 ] | From Parallel Axis Theorem |
7. Conceptual Questions
1. What is the M.I. of a thin uniform rod about its center?
[ I_{center} = \dfrac{1}{12} M L^2 ]
2. What is the M.I. of a thin uniform rod about one of its ends?
[ I_{end} = \dfrac{1}{3} M L^2 ]
3. Which has greater M.I.—about the center or about the end?
About the end, because the axis is farther from the mass distribution.
4. How are [ I_{end} ] and [ I_{center} ] related?
[ I_{end} = I_{center} + M \left(\dfrac{L}{2}\right)^2 ]
5. What theorem helps relate M.I. about parallel axes?
The **Parallel Axis Theorem**.
6. How does M.I. vary with the length of the rod?
[ I \propto L^2 ]
7. If the mass of the rod doubles, what happens to M.I.?
M.I. also doubles, since [ I \propto M ].
8. Why is the M.I. about the end larger than about the center?
Because the average distance of mass elements from the axis is greater when the axis passes through the end.
9. What type of rotation corresponds to M.I. about the center?
Rotation about the center of mass (symmetric rotation).
10. Can the Parallel Axis Theorem be used in this derivation?
Yes, it confirms that [ I_{end} = I_{center} + M \left(\dfrac{L}{2}\right)^2 ].
11. What is the ratio of M.I. about the end to that about the center?
[ \dfrac{I_{end}}{I_{center}}] = [\dfrac{(1/3)}{(1/12)} = 4 ]
12. What is the unit of M.I. in SI system?
[ \text{kg·m}^2 ]
13. Why is the M.I. a scalar quantity?
It depends only on magnitude (mass and distance), not direction.
14. What physical quantity does M.I. affect in rotational motion?
It determines the **angular acceleration** for a given torque.
15. If the rod is non-uniform, does the same formula apply?
No, because the mass distribution is not uniform.
8. FAQ / Common Misconceptions
1. Is the M.I. about the end equal to that about the center?
No, M.I. about the end is four times greater than that about the center.
2. Can the M.I. be zero for a rod?
No, M.I. can never be zero unless there’s no mass or no rotation.
3. Does the thickness of the rod affect M.I.?
Only if it’s not “thin.” In a thin rod, thickness is neglected.
4. Does the M.I. depend on the orientation of the rod?
Yes, it changes with the position and direction of the rotation axis.
5. Can we use the same formula for a rod rotating about its length?
No, because in that case, every mass element lies on the axis, so [ I = 0 ].