
1. Concept Overview
A cylinder rolling down an incline can either roll without slipping (pure rolling) or slip (with kinetic friction). For rolling without slipping, there is a kinematic constraint:
[ v = \omega R ]
where [ v ] is the translational speed of the cylinder’s center, [ \omega ] its angular speed, and [ R ] its radius.
Two standard analysis approaches:
- Newton’s second law + torque (dynamics): use forces and torques to get linear acceleration.
- Energy method: Use conservation of mechanical energy (if no dissipative work) to relate translational and rotational energy.
2. Key Features
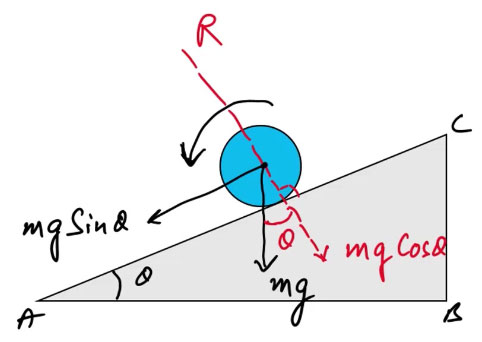
- The cylinder rolls without slipping down an inclined plane making an angle [\theta] with the horizontal.
- The frictional force prevents slipping but does no work since there is no relative motion at the point of contact.
- The motion involves both translational and rotational kinetic energy.
- The acceleration of the center of mass depends on the moment of inertia of the cylinder.
3. Derivation
Let the following be given:
- Mass of the cylinder = [M]
- Radius = [R]
- Angle of incline = [\theta]
- Acceleration of the center of mass = [a]
- Angular acceleration = [\alpha]
Since the cylinder rolls without slipping:
[
a = R \alpha
]
The forces acting on the cylinder are:
- Component of weight along incline = [M g \sin \theta]
- Frictional force (up the incline) = [f]
Applying Newton’s second law along the incline:
[
M g \sin \theta – f = M a \quad \text{…(1)}
]
About the center of mass, torque is:
[
f R = I \alpha
]
For a solid cylinder,
[
I = \dfrac{1}{2} M R^2
]
Substituting [\alpha = \dfrac{a}{R}]:
[
f R = \dfrac{1}{2} M R^2 \dfrac{a}{R}
]
[
f = \dfrac{1}{2} M a \quad \text{…(2)}
]
Substitute (2) in (1):
[
M g \sin \theta – \dfrac{1}{2} M a = M a
]
[
a = \dfrac{2}{3} g \sin \theta
]
Thus, the acceleration of the rolling cylinder is:
[
\boxed{a = \dfrac{2}{3} g \sin \theta}
]
The frictional force can be found from (2):
[
f = \dfrac{1}{3} M g \sin \theta
]
4. Energy Relation
For rolling without slipping, the total kinetic energy is:
[
K = \dfrac{1}{2} M v^2 + \dfrac{1}{2} I \omega^2
]
Substitute [I = \dfrac{1}{2} M R^2] and [\omega = \dfrac{v}{R}]:
[
K = \dfrac{1}{2} M v^2 + \dfrac{1}{4} M v^2 = \dfrac{3}{4} M v^2
]
So, the total kinetic energy is [\dfrac{3}{4} M v^2].
5. Important Formulas to Remember
| Quantity | Expression |
|---|---|
| Condition for rolling without slipping | [a = R \alpha] |
| Torque due to friction | [\tau = f R] |
| Moment of inertia of a solid cylinder | [I = \dfrac{1}{2} M R^2] |
| Acceleration of cylinder on incline | [a = \dfrac{2}{3} g \sin \theta] |
| Frictional force | [f = \dfrac{1}{3} M g \sin \theta] |
| Total kinetic energy | [K = \dfrac{3}{4} M v^2] |
6. Conceptual Questions
1. Why does a solid cylinder roll down faster than a hollow cylinder of same mass and radius?
Because its [ I/(mR^2) ] is smaller, so denominator in [ a = g\sin\theta/(1+I/mR^2) ] is smaller, giving larger [ a ].
2. Does static friction do work when a cylinder rolls without slipping?
No — static friction does not do net work on the center-of-mass motion for pure rolling (point of contact is instantaneously at rest).
3. Can a cylinder roll without any friction?
No — some static friction (no slipping) is required to produce torque that causes rotation.
4. If the plane is frictionless, what happens?
The cylinder will slide without rolling; rotational acceleration will be zero if no torque acts.
5. For fixed [θ], what makes the acceleration larger: increasing mass or changing mass distribution?
Changing mass (uniformly) does not alter [ a ] because it cancels — but changing mass distribution (affecting [I]) affects [ a ].
6. If two cylinders of equal mass but different radii roll down, does radius alone decide acceleration?
No — acceleration depends on [ I/(mR^2) ], so radius cancels for homogeneous shapes where [ I ∝ mR^2 ], but shape matters.
7. How does incline angle [θ] affect whether rolling occurs?
Higher [θ] increases tendency to slip because required static friction increases; but rolling still possible if static friction available.
8. Does energy method require frictional force value?
No, for static friction (no slip) energy conversion uses constraint [ v = ωR ] and does not need [ f ] explicitly.
9. Can rotational kinetic energy be larger than translational kinetic energy?
Yes, depending on [ I/(mR^2) ]; heavy rotational inertia stores more energy in rotation.
10. Why does static friction act up the plane for a rolling cylinder?
Because gravity tends to accelerate translation more than rotation initially; friction provides torque that increases rotation, so it acts up the plane.
11. Is the acceleration constant as the cylinder rolls down a fixed slope?
Yes, if the slope angle [θ] is constant and rolling remains without slipping, acceleration is constant.
12. How does hollow vs solid affect final speed after descending same height?
Using energy partition, v_final depends on [ I/(mR^2) ]; smaller [ I/(mR^2) ] → larger final [ v ].
13. If friction is large, can slipping still occur?
Slipping occurs only if required static friction exceeds available maximum; large friction decreases chance of slipping.
14. Does the cylinder’s moment of inertia depend on axis orientation?
Yes — we use moment of inertia about cylinder’s symmetry axis passing through center.
15. What role does the contact patch size play?
For ideal rigid bodies in elementary problems, contact is a point; in real bodies contact area affects rolling resistance but not ideal equations.
7. FAQ / Common Misconceptions
1. Is the faster object always the heavier one?
No — mass cancels in acceleration formula; distribution (I) matters more than total mass.
2. Does static friction increase the translational acceleration?
Not directly — static friction provides torque for rotation and reduces net driving force (mg sinθ – f), so it actually *reduces* linear acceleration compared to pure sliding.
3. If a cylinder rolls without slipping, is mechanical energy always conserved?
Yes, provided there is no energy loss (no rolling friction or air drag); static friction does no net work so energy is conserved between potential and kinetic forms.
4. Do larger radius objects always accelerate slower?
Not necessarily — for homologous shapes the dependence cancels; what matters is the normalized inertia [I/(mR^2)].
5. Is slipping same as rolling?
No — slipping involves kinetic friction and energy dissipation; rolling (without slip) involves static friction and no energy loss from friction.
8. Practice Questions (with Solutions)
Q1. A solid cylinder rolls without slipping down a 30° incline. Find its acceleration.
Solution:
[
a = \dfrac{2}{3} g \sin 30° = \dfrac{2}{3} \times 9.8 \times \dfrac{1}{2} = 3.27 , \text{m/s}^2
]
Q2. What is the ratio of translational to rotational kinetic energy for a rolling cylinder?
Solution:
[\dfrac{K_{\text{trans}}}{K_{\text{rot}}}] [= \dfrac{\frac{1}{2} M v^2}{\frac{1}{4} M v^2} = 2:1]
Q3. A solid sphere and a solid cylinder roll down the same incline. Which reaches the bottom first?
Solution:
The sphere has a smaller moment of inertia relative to [M R^2], so it has greater acceleration and reaches first.
Q4. Find the frictional force on a 5 kg solid cylinder rolling down a 45° incline.
Solution:
[f = \dfrac{1}{3} M g \sin 45°] [= \dfrac{1}{3} (5)(9.8)(0.707) \approx 11.5 \text{N}]
Q5. Calculate the time taken by a cylinder to roll 2 m down a 30° incline from rest.
Solution:
[
a = \dfrac{2}{3} g \sin 30° = 3.27 , \text{m/s}^2
]
Using [s = \dfrac{1}{2} a t^2]:
[
t = \sqrt{\dfrac{2s}{a}} = \sqrt{\dfrac{4}{3.27}} = 1.10 , \text{s}
]